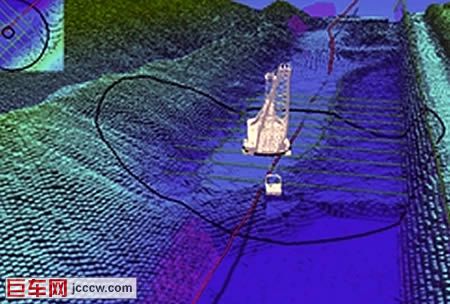
最近,在拉铲采矿创新上处于领先的MineWare,与CRCMining 和昆士兰大学合作,完成了由ACARP提供了60万美元资助的ACARP项目的第一阶段——还有来自MineWare和 CRCMining的实物支持——该联合研发项目旨在开发未来的挖掘顺序技术。 MineWare的 CEO和项目合作领导者Andrew Jessett称,该项目现阶段重点是设计拉铲的挖掘顺序系统,通过复杂的算法来支持,结合实时DTM扫描技术、3D矿山规划图及操作者反馈。 利用MineWare的数字地形测绘能力,拉铲挖掘顺序系统将充当机载管理者的角色,能够持续监测挖掘状态并指导操作者来计算最优的挖掘顺序,他说,通过使用两个大臂末端的激光器,拉铲沿地形的典型回转动作可生成采坑的3D图形,为未来的运行顺序提供有效的算法公式,包括机器位置、挖掘点和倾卸点。 原型机的算法能有效地为沿带状物料挖掘创建一个策略,以减少循环时间、提高弃土利用率及直线动作比率,从而提高生产率。 此项目的第二阶段,团队将把该算法用在正式运行的拉铲上进行测试,将其集成到MineWare的Pegasys拉铲监测系统中。在此阶段,操作者可视化及管理者报告工具将会开发出来,以针对顺序算法对基于操作者的挖掘顺序进行分析,Jessett补充说,之后,就能对此算法进行进一步的开发,使之可用于不同环境下的其它开采条件中,将来,可用于拉铲的自动化。 |